Prix et distinctions
Recherche et innovation
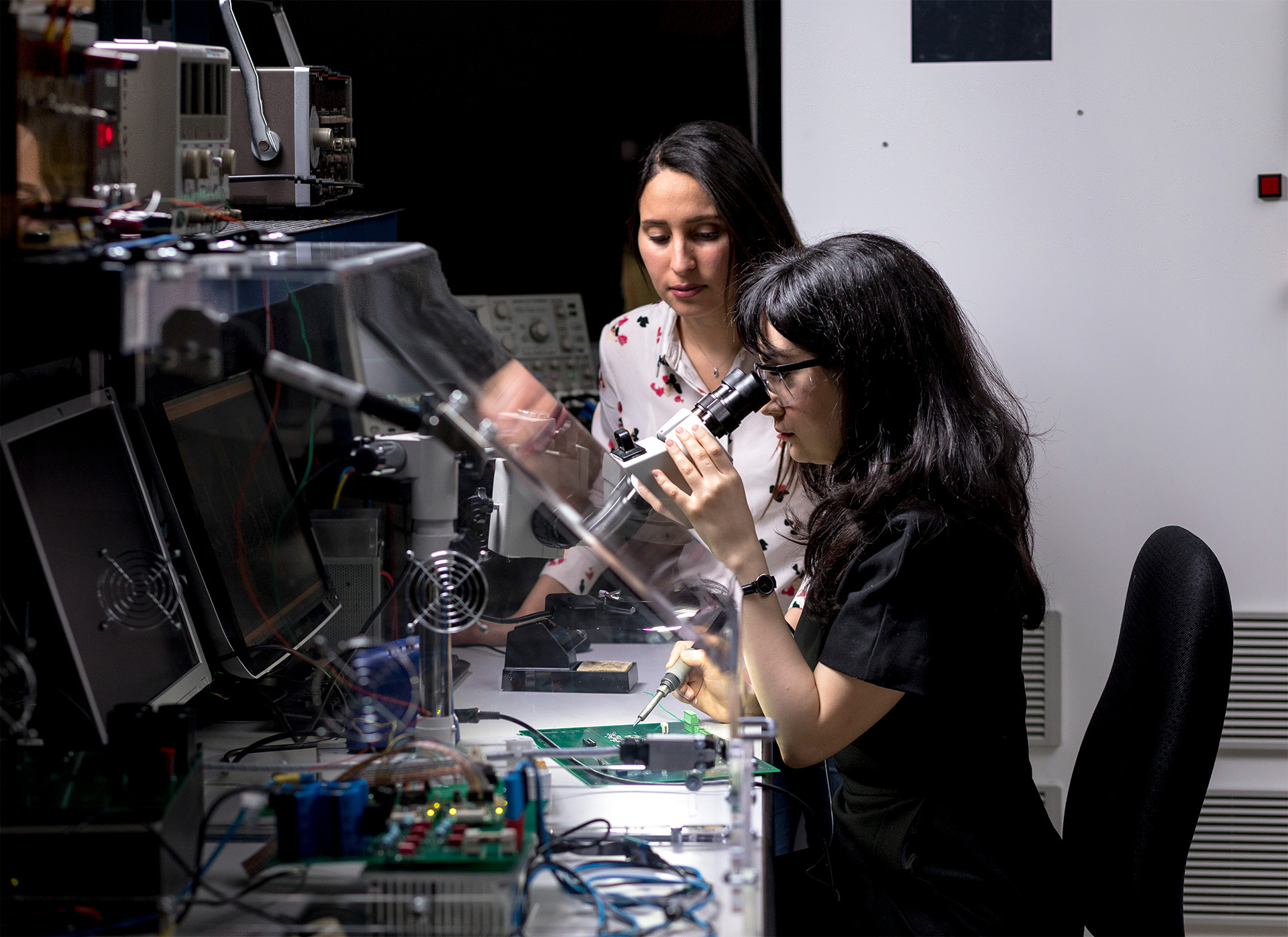
LACIME – Laboratoire de communications et d’intégration de la microélectronique
Actualités



24 avril 2024
Programme NeuroFOCUS | Brisez l’isolement, restez actives et actifs et optimisez vos capacités!



23 avril 2024
La Feuille de route gouvernementale en économie circulaire au Québec saluée par l’ÉTS, le CERIEC, l’Institut AdapT et le RRECQ



17 avril 2024
Fin de session et recherche de stage

17 avril 2024
Des investissements importants à l’ÉTS pour développer la recherche appliquée en sciences quantiques




16 avril 2024
Gala d’excellence : recherche et enseignement 2024
1
Vous êtes actuellement sur cette page
2
Aller à la page : 2
3
Aller à la page : 3
...
51
Aller à la page : 51
Aller à la page suivante
Explorez votre avenir
universitaire